ĮYśŗąįĘ┬╔·ÖCŲ„╚╦ŽĄĮyŻ¼╚ńÖCąĄ▒█(robotic arm)ĪóÖCąĄ╩ų(robotic hand)ęį ╝░ÖCąĄ═╚(robotic leg),ę╗░ŃČ╝Š▀ėą╚╦╣żĻP╣Ø(artificial joint)ĪŻ═©▀^╚╦╣żĻP╣ØŻ¼ ÖCŲ„╚╦Ą─╣Ū„└(▀BŚU)▒╗┬ōŽĄį┌ę╗ŲĪŻ▀@ĘN▀BĮėĄ─ęŌ┴xį┌ė┌Ż¼ÖCŲ„╚╦Ą─ų½¾w═©▀^ ╚╦╣żĻP╣Ø┐╔½@Ą├Ų┌═¹Ą─ūįė╔Č╚ĪŻ
╚ßąįĻP╣Ø(flexible joint)╩Ū╚ßąįÖCŲ„╚╦Ą─▓┐╝■╗“ĮM│╔▓┐ĘųĪŻ╚ßąįĻP╣Øīó╩╣ ÖCŲ„╚╦½@Ą├Ė³Ė▀Ą─ūįė╔Č╚ĪŻ═¼ĢrŻ¼╚ßąįĻP╣Øę“Ųõ╬³─▄ū„ė├Ż¼ī”ė┌ÖCŲ„╚╦ŽĄĮyŻ¼╠ž äe╩ŪęŲäė╩ĮÖCŲ„╚╦ŽĄĮyŻ¼Š▀ėąĘ└ū▓ō¶ĪóĘ└š±äėĄ╚▒Żūoū„ė├ĪŻ
2000─ĻŻ¼Soviknes ║═ Sætveit į┌╠ßĮ╗Įo├└ć°īŻ└¹ŠųĄ─īŻ└¹╔Ļšłł¾ĖµųąŻ¼╣½ķ_ ┴╦ę╗ĘN╚ßąįč®░ÕÖCŲ„╚╦Ą─įOėŗ[łD2.2(a)]2]ĪŻ
╚ßąįč®░ÕÖCŲ„╚╦Ą─▄|Ė╔═©▀^ųŌĻP╣Ø║═ŽźĻP╣Ø┼cų½¾w▀BĮėį┌ę╗Ų[łD2.2 (b)] ĪŻ ×ķ┴╦─ŻöM╚╦¾wĄ─╚ßąįŽ▐ųŲ(flexible limitation),Soviknes ║═ Sætveit įO ėŗ ┴╦╚ßąįĄ─ųŌĻP╣Ø║═ŽźĻP╣ØŻ¼ŲõųąŻ¼ÅŚąį▓─┴Ž(elastic material)▒╗ė├ū„╚╦╣ż╝Ī╚Ō (artificial muscle)ĪŻ╚╦╣ż╝Ī╚Ō═©▀^ųŌĻP╣ØīóŪ░▒█┼c╔Ž▒█▀BĮėį┌ę╗ŲŻ¼═©▀^ŽźĻP ╣ØīóŽ┬ų½┼c╔Žų½▀BĮėį┌ę╗ŲĪŻ
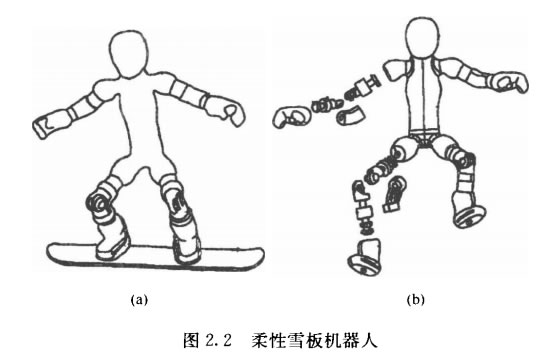
╚ßąįč®░ÕÖCŲ„╚╦Ą─╚ßąįųŌĻP╣Ø║═╚ßąįŽźĻP╣Ø┐╔ūįäėĄž«a╔·╗žÅŚ┴”Ż¼Å─Č°╩╣ ŲõūįäėĄžŅAŽ╚š{š¹ø_č®(snow-boarding) ū╦æBĪŻ
(1)┐ŲīWĄ──┐Ą─ĪŻ│÷ė┌┐ŲīW蹊┐Ą─ąĶę¬(╚ńĘ┬╔·īW蹊┐Ą─ąĶę¬)Č°įOėŗśŗįņ╚ßąįÖCŲ„╚╦ŽĄĮy;(2)╣ż│╠Ą──┐Ą─ĪŻ│÷ė┌╣ż│╠īŹ█`Ą─ąĶę¬(╚ń╠žČ©╣”─▄Ą─ąĶŪ¾╝░īŹ¼F)Č°įOėŗśŗįņ╚ßąįÖCŲ„╚╦ŽĄĮyĪŻ
ā╔▌åÖCŲ„╚╦Ą─▀\äėŲĮ║Ō┐žųŲå¢Ņ}╔µ╝░ā╔éĆĘĮ├µ,ę╗╩ŪĪ░ŲĮ║ŌĪ▒,╝┤ū╦æBŲĮ║Ō┐žųŲĄ─å¢Ņ}Ż╗Č■╩ŪĪ░▀\äėĪ▒,╝┤▀\äė▄ē█E┐žųŲĄ─å¢Ņ};ā╔▌åÖCŲ„╚╦Ą─▀\äė▄ē█E┐žųŲå¢Ņ}Ż¼╩ŪŲõąą▀M╦┘Č╚║═ąą▀MĘĮŽ“Ą─┐žųŲå¢Ņ}
Ąū▒Pų„ę¬ė├ė┌░▓čb╗“▀BĮėÖC¾w┼c▌åŽĄŻ¼öyĦ║═╣╠Č©“īäėŽĄĮy;ÖC¾w┐╔čb▌dĖ„ĘNļŖūėįOéõ;▌åŽĄ═©▀^▌å▌S╗“é„äėÖCśŗ░▓čbį┌Ąū▒PĄ─ū¾ėęā╔é╚Ż¼Ęųäeė╔ū¾ļŖÖC║═ėęļŖÖC“īäė
ŠžĻćé„ĖąŲ„ŠWĮjŠ═─▄ē“╠ß╣®╬’¾wą╬ĀŅĄ─Å═ļsöĄō■,▀@ĘNą┼ŽóĘų╬÷╝╝ągĮąū÷ą╬ĀŅūRäe ,▓╔ė├ē║ļŖį¬╝■Ą─ŠžĻćé„ĖąŲ„,─▄ē“½@Ą├╬’¾wū„ė├┴”ą╬│╔Ą─ė│Ž±
╬óą═ķ_ĻP┐╔─▄╩ŪĮėė|é„ĖąŲ„ūŅĮøØ·║═ūŅ│Żė├Ą─ŅÉą═,ūo╬’¾w▓╗╩▄ĄĮ▀^┤¾Ą─ū„ė├┴”;Ė¶ļx╩ĮļpæBĮėė|é„ĖąŲ„ŽĄĮyų„ę¬ė╔ļpĘĆæBķ_ĻPĮM│╔,ųžÅ═Č╚┐╔▀_1”╠m, Ęų▒µČ╚×ķ2 ”╠m
Įī┘ļŖūĶą═┴”ėXé„ĖąŲ„£yČ©ļŖūĶĮzĄ─ūĶųĄūā╗»Ż¼Š═┐╔ų¬Ą└╬’¾wĄ─ą╬ūā┴┐Ż¼▀MČ°Ū¾│÷═Ōū„ė├┴”;░ļī¦¾wą═┴”ėXé„ĖąŲ„Ą─æ¬ūāŽĄöĄ┐╔▀_100Ī½200,│▀┤ńąĪŻ¼ņ`├¶Č╚Ė▀Ż¼ę“Č°┐╔┐┐ąį║▄Ė▀
ė╔╦┘Č╚£y┴┐▀Mąą═Ųč▌,▀@ĘNĘĮĘ©║▄ļy½@Ą├ØMęŌĄ─£y┴┐ĮY╣¹;ęčų¬┘|┴┐Ą─╬’¾w╝ė╦┘Č╚╦∙«a╔·Ą─┴”╩Ū┐╔ęį£y┴┐Ą─;┼c▒╗£y╝ė╦┘Č╚ėąĻPĄ─┴”┐╔ęį×ķļŖ┤┼┴”╗“ļŖäė┴”,░čĘĮ│╠╩Į║å╗»×ķī”ļŖ┴„Ą─£y┴┐å¢Ņ}
ų▒┴„£y╦┘░lļŖÖC╦³é„╦═ę╗éĆš²▒╚ė┌╩▄┐ž╦┘Č╚Ą─ų▒Įėą┼╠¢ĪŻ▀@ĘNé„Ėą Ų„Ą─▀xō±╩Ūė╔ŲõŠĆąįČ╚(┐╔▀_0.1%)Īó┤┼£■│╠Č╚ĪóūŅ┤¾┐╔ė├╦┘Č╚(▀_3000Ī½8000r/min) ęį ╝░æT┴┐ģóöĄøQČ©Ą─
ų▒ŠĆęŲäėé„ĖąŲ„ėąļŖ╬╗ėŗ╩Įé„ĖąŲ„║═┐╔š{ūāē║Ų„ā╔ĘN;ūŅ│ŻęŖĄ─╬╗ęŲé„ĖąŲ„╩Ūų▒ŠĆ╩ĮļŖ╬╗ėŗ,«öžō▌dļŖūĶ×ķ¤oĖF┤¾ĢrŻ¼ļŖ╬╗ėŗĄ─▌ö│÷ļŖē║u₂ ┼c ļŖ ╬╗ ėŗā╔Č╬Ą─ļŖūĶ│╔▒╚└²
ÖCŲ„╚╦╣żū„šŠā╚Ą─é„ĖąŲ„ų„ę¬ė├ė┌ķgĮė╠ß╣®ųąķgėŗ╦ŃĮY╣¹╗“ų▒Įė╠ß╣®╚╬äš│╠ą“ųą╚╬║╬čėŲ┌öĄō■ųĄ;ę╗éĆĘŪĮėė|╩Įé„ĖąŲ„ī”─▄┴┐░l╔õčbų├╦∙«a╔·Ą─Ė╔ö_═∙═∙╩Ū║▄├¶ĖąĄ─
▀^ė▓╝■░čŽÓĻP─┐ś╦╠žąį▐DōQ×ķą┼╠¢;░č╦∙½@ą┼╠¢ūāōQ×ķęÄäØ╝░ł╠ąą─│éĆÖCŲ„╚╦╣”─▄╦∙ąĶꬥ─ą┼ŽóŻ¼░³└©ŅA╠Ä └Ē║═ĮŌßīā╔éĆ▓Į¾E,▀@ĘNą┼Žó┐╔▒╗Ę┤üęįą▐ š²║═ųžÅ═įōĖąėXĒśą“Ż¼ų▒ų┴Ą├ĄĮ╦∙ąĶꬥ─ą┼Žó×ķų╣
é„ĖąŲ„ė÷ĄĮ╠žČ©ÜŌ╬ČĢ■«a╔·ļŖūĶ╗“š▀Ņl┬╩Ą─ūā╗»Ż¼╬ęéāŠ═╩Ūīó▀@ą®ūā ╗»▓ČūĮĄĮŻ¼▓ó▐D╗»│╔─▄ē“é„▀fĄ─ļŖą┼╠¢Ż¼╚╗║¾ī”é„ĖąŲ„Ļć┴ąé„╚ļĄ─ą┼╠¢▀Mąą×V ▓©ĪóĘ┼┤¾║═╠žš„╠ß╚Ī






