

ę¬ė├║┌─zĦųŲū„ę╗Ę∙├įīmĄžłDŻ¼╚ńłD10-3╦∙╩ŠĪŻį┌├įīmĄ─│÷┐┌╠Ä ė├ę╗éĆšŽĄK╬’«öū„Ī░īÜ▓žĪ▒ĪŻ╚╗║¾Ż¼╬ęéāÖCŲ„╚╦Ą─╚╬䚊═╩ŪĒś└¹═©▀^├įīm▓óŪę═Żį┌Ī░īÜ▓žĪ▒ Ū░├µĪŻ▀@└’Ž╚üĒ╠Ä└Ēę╗éĆ║å╗»Ą─å¢Ņ}Ż¼╝┘įO├įīmĄ─ĄžłD╩Ūęčų¬Ą─Ż¼ę▓Š═╩ŪšfŻ¼ÖCŲ„╚╦ų¬Ą└æ¬įōŽ“╩▓├┤ĘĮŽ“Ż¼▐DÄū┤╬ÅØ▓┼─▄ū▀│÷├įīmĪŻ
īŹ “× Ų„ ▓─
Īż ęčĮøĮMčb║├Ą─ÖCŲ„╚╦Ż╗
Īż ėŗ╦ŃÖC╝░▄ø╝■ŠÄ│╠ŁhŠ│Ż╗
ĪżUSB Ž┬▌dŠĆŻ╗
Īż ų„┐žųŲŲ„Ż╗
Īż Ąž├µ╗ęČ╚Öz£yé„ĖąŲ„─ŻēK4ēKŻ╗
Īż ╝t═Ō▒▄šŽé„ĖąŲ„1éĆŻ╗
Īż ║┌╔½─zĦ1ŠĒŻ╗
Īż ū„×ķīÜŽõĄ─£\╔½┴óĘĮ¾w1éĆĪŻ
īŹ“×▓Į¾E
1.▀BĮėÖCŲ„╚╦
Ž╚īóÖCŲ„╚╦ĪóöUš╣░Õ║═Ąž├µ╗ęČ╚Öz£yé„ĖąŲ„─ŻēK▀BĮė║├ĪŻŲõųąŻ¼Ąž├µ╗ęČ╚Öz£yé„Ėą Ų„▀BĮėĄĮA0Ī½A3 Č╦┐┌ĪŻ╝t═Ō▒▄šŽé„ĖąŲ„▀BĮėĄĮD3 Č╦┐┌ĪŻ
2.š{įć╗ęČ╚ķōųĄ
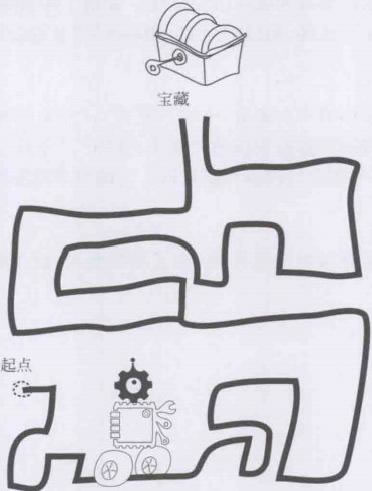
═¼śėŻ¼Ž±ęįŪ░ę╗śė═©▀^īŹ“×┤_Č©ÖCŲ„╚╦╦∙▓╔ė├Ą─╗ęČ╚ķōųĄĪŻę“×ķ4éĆé„ĖąŲ„Ą─ļŖ┬Ę ║═░▓čb╔Ž┐╔─▄Ģ■│÷¼F╬óąĪĄ─▓ŅäeŻ¼╦∙ęį▀@└’▒╚▌^ĘĆ═ūĄ─╠Ä└ĒĘĮ╩Į╩Ū▓╗ꬎė┬ķ¤®Ż¼×ķ╦³éā├┐ éĆČ╝£y┴┐ę╗éĆ╗ęČ╚ķōųĄĪŻ
3.ŠÄīæ│╠ą“
╝┘įOį┌ęčų¬Ą─ĄžłDųąŻ¼ÖCŲ„╚╦ų╗ę¬į┌┼÷ĄĮ┬Ę┐┌ĢrŽ╚▀Mąąā╔┤╬ū¾▐DÅØŻ¼į┘▀Mąąę╗┤╬ėę▐D ÅØŻ¼Š═─▄ū▀│÷├įīm┴╦ĪŻė├╬ęéāäéäéīW┴Ģ▀^Ą─║»öĄų¬ūRŻ¼▀@éĆ│╠ą“┐╔ęįīæ│╔Ž┬├µ╩Š└²ųąĄ─śė ūėĪŻ═¼śėŻ¼▀@éĆ╩Š└²ųą┼c╔Ž╣Øšn╩Š└²│╠ą“ėą║▄ČÓųž║ŽĄ─ĄžĘĮŻ¼ė├╩Ī┬į╠¢īóų«┬į╚źĪŻ
║»öĄ╚ń║╬ĘŌčbĄ─å¢Ņ}Ż¼╩Ūø]ėąę╗éĆ╣╠Č©┤░ĖĄ─Ż¼╩Š└²│╠ą“ųąĮo│÷Ą─┐╔─▄ę▓▓╗╩ŪZ║├Ą─ĮŌøQĘĮ░ĖĪŻ┐éų«Ż¼┴╝║├Ą─║»öĄĘŌčb┐╔ęįūī─ŃĄ─│╠ą“ūāĄ├Ė³║åØŹĪóĖ³┐╔ūxęį╝░Ė³╚▌ęūŠSūo║═ ą▐Ė─Ż¼═¼īWéāį┌┬²┬²Ęe└█ŠÄ│╠Įø“ץ─▀^│╠ųąŠ═Ģ■├■╦„│÷╚ń║╬ĘŌčb║»öĄĄ─Ė[ķT┴╦ĪŻ
const int InfraPort=3;
int counter=0;
//║»öĄ┬Ģ├„
void turn_left();
void turn_right();
void stop();
void go_straight();
void setup(){
pinMode(InfraPort,INPUT);
} void loop(){
if(digitalRead(InfraPort)==HIGH){ stop();
while(1);
//▒▄šŽé„ĖąŲ„▀BĮėD3 Č╦┐┌
//ė├ė┌ėŗöĄ═©▀^┬Ę┐┌öĄ─┐Ą─ūā┴┐
//šęĄĮīÜ▓žŻ¼═ŻŽ┬üĒ
}
if(leftValue
}else if(leftValue>Threshold II rightValue>Threshold){ //ė÷ĄĮ┬Ę┐┌
if(counter<2){
turn_left();
}else if(counter==2){
turn_right(); }else{
stop();
while(1); }
counter++;
)else if(leftMiddleValue>Threshold){
analogWrite(LeftSpeedPort,TurnHighSpeed);
analogWrite(RightSpeedPort,TurnLowSpeed); )elsef
analogWrite(LeftSpeedPort,TurnLowSpeed);
analogWrite(RightSpeedPort,TurnHighSpeed); }
delay(100);
//Ū░ā╔┤╬ė÷ĄĮ┬Ę┐┌ū¾▐D
//Ą┌3┤╬ė÷ĄĮ┬Ę┐┌ėę▐D
//į┘ė÷ĄĮ┬Ę┐┌Š══Żų╣Ż¼ėą┐╔─▄ĄžłD│÷Õe┴╦
//Ž“ėę▐DÅØ
//Ž“ū¾▐DÅØ
//ū¾▐D90ĪŃĄ─║»öĄīŹ¼F
void turn_left(){
digitalWrite(LeftDirPort,LOW);
analogWrite(LeftSpeedPort,Forwardspeed);
analogWrite(RightspeedPort,ForwardSpeed);
delay(DelayTime);
digitalWrite(LeftDirPort,HIGH);
}
//ėę▐D90ĪŃĄ─║»öĄīŹ¼F
void turn_right(){
digitalWrite(RightDirPort,LOW);
analogWrite(RightSpeedPort,ForwardSpeed);
analogWrite(LeftSpeedPort,Forwardspeed);
delay(DelayTime);
digitalWrite(RightDirPort,HIGH); }
//ų▒ąą║»öĄ
void go_straight(){
analogWrite(LeftSpeedPort,ForwardSpeed);
analogWrite(RightSpeedPort,ForwardSpeed); }
//═Żų╣║»öĄ
void stop(){
analogWrite(LeftSpeedPort,0);
analogWrite(RightSpeedPort,0);
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



