

Agility Robotics╩Ūę╗╝ęų┬┴”ė┌ļpūŃÖCŲ„╚╦čą░l(f©Ī)Ą─│§äō(chu©żng)╣½╦ŠĪŻAgility Robotics 2015─Ļ│╔┴óė┌├└ć°Ż¼▓┐Ęųäō(chu©żng)╩╝łFĻĀ║═╝╝ąg(sh©┤)│╔╣¹ ├ō╠źė┌ČĒ└šī∙ų▌┴ó┤¾īW(xu©”)Ą─äėæB(t©żi)ÖCŲ„╚╦īŹ“×╩ęĪŻAgility Roboticsų┬┴”ė┌čą░l(f©Ī)║═ųŲįņļpūŃÖCŲ„╚╦Ż¼▓óīóŲõį┌╔╠śI(y©©)Łh(hu©ón)Š│ųąæ¬(y©®ng)ė├ĪŻ 2017─ĻŻ¼Agility Robotics═Ų│÷┴╦ļpūŃÖCŲ„╚╦CassieŻ¼╦³ø]ėą╔Ž░ļ╔ĒŻ¼ų╗ėą┐Ķ▓┐║═ā╔ŚlŅÉ╦Ų°r°BĄ─═╚ĪŻ2019─ĻŻ¼Agility═Ų│÷┴╦ ╚╦ą╬ÖCŲ„╚╦DigitŻ¼į┌CassieĄ─╗∙ĄA(ch©│)╔Ž╝ė╔Ž┴╦▄|Ė╔Īó╩ų▒█Ż¼▓óį÷╝ė┴╦Ė³ČÓėŗ╦Ń─▄┴”ĪŻ
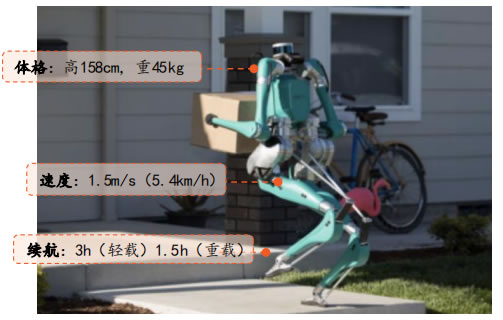
DigitÅ─╣”─▄│÷░l(f©Ī)▀MąąįO(sh©©)ėŗŻ¼ėą═¹į┌╬’┴„Lė“?q©▒)Ź¼F(xi©żn)æ¬(y©®ng)ė├ĪŻ▓╗═¼ė┌▓©╩┐ŅDäė┴”Atlasī”▀\äė─▄┴”Ą─╚▀ėÓįO(sh©©)ėŗŻ¼Agilityų┬┴”ė┌īóÖC Ų„╚╦═Č╚ļīŹļHæ¬(y©®ng)ė├ĪŻDigitų„ę¬×ķ╬’┴„ł÷Š░įO(sh©©)ėŗŻ¼┐╔ęį─├Ų║═Čč»B18kgųžĄ─ŽõūėŻ¼▀MąąęŲäė░³╣³ĪóąČžøĄ╚╣żū„Ż¼ Ī░║¾ę╗ ╣½└’Ī▒┼õ╦═╣”─▄ę▓š²į┌ķ_░l(f©Ī)«öųąĪŻAgility╣½╦Šäō(chu©żng)╩╝╚╦šJ×ķŻ¼┼cąĪ▄ćŽÓ▒╚Ż¼ļpūŃÖCŲ„╚╦į┌╬’┴„Lė“Ģ■š╣¼F(xi©żn)│÷Ė³┤¾Ą─ņ`╗ŅąįĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦(d©Żo)ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦(d©Żo)į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦(d©Żo)ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖCŲ„╚╦ |



