
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
╚╦Ą─░l(f©Ī)┬ĢŲ„╣┘┐╔ęįĘų×ķā╔éĆ(g©©)▓┐ ĘųŻ¼╝┤┬ĢĄ└║═┬ĢĦĪŻ╚ń╣¹ų▒ĮėūīÖC(j©®)Ų„╚╦└ĒĮŌ╬ęéāšf(shu©Ł)Ą─įÆŻ¼ļyČ╚▒╚▌^┤¾Ż¼īó╚╦ŅÉšZ(y©│) čį▐D(zhu©Żn)╗»×ķÖC(j©®)Ų„╚╦┐╔ęį└ĒĮŌūR(sh©¬)äeĄ─ą┼╠¢(h©żo)Ż¼Š═╩Ūę╗éĆ(g©©)║▄║├Ą─═ŠÅĮĪŻ╚ń╣¹īóš¹éĆ(g©©)▀^(gu©░)│╠┐┤ ×ķę╗éĆ(g©©)ą┼╠¢(h©żo)▀^(gu©░)│╠Ą─įÆŻ¼┬ĢĦ╩Ū░l(f©Ī)╔·į┤Ż¼┬ĢĄ└ŽÓ«ö(d©Īng)ė┌ę╗éĆ(g©©)ųCš±Ģr(sh©¬)Ą─┬ĢĦš±äė(d©░ng)Ż¼┐╔ė├ ę╗éĆ(g©©)├}ø_┤«░l(f©Ī)╔·Ų„┤·╠µĪŻ░l(f©Ī)ę╗ą®ėą┬ĢĦš±äė(d©░ng)Ą─ę¶Ģr(sh©¬)Ż¼┐╔ė├ę╗éĆ(g©©)├}ø_┤«░l(f©Ī)╔·Ų„┤· ╠µĪŻ░l(f©Ī)ę╗ą®¤o(w©▓)š±ę¶Ą─Ģr(sh©¬)║“Ż¼ę“?y©żn)ķ┬ĢĦ▓ó▓╗š±ä?d©░ng)Ż¼Č°╩ŪÅ─║Ē╣▄░l(f©Ī)│÷Ą─Ż¼ų╗╩Ūę╗░ŃĄ─ ļSÖC(j©®)ÜŌ┴„Ż¼┐╔ęįė├ę╗éĆ(g©©)įļ┬Ģ░l(f©Ī)╔·Ų„┤·╠µĪŻ╔Ž╬─ĮķĮB▀^(gu©░)Ż¼┬Ģ궥─ÅŖ(qi©óng)╚§╩Ūūā╗»Ą─Ż¼ė├ ę╗éĆ(g©©)į÷ęµę“ūėK üĒ(l©ói)▒Ē╩ŠĄ─įÆ
═©▀^(gu©░)╔Ž├µĄ─▐kĘ©Ż¼╬ęéā┐╔ęį░čšZ(y©│)궹┼╠¢(h©żo)▐D(zhu©Żn)╗»×ķÖC(j©®)Ų„╚╦─▄ē“└ĒĮŌĄ─ļŖą┼╠¢(h©żo)Ż¼ ─Ū├┤ÖC(j©®)Ų„╚╦ėųę¬į§śė╚ź└ĒĮŌ─ž?
ė╔ė┌╚╦ŅÉĄ─šZ(y©│)čįĘŪ│ŻÅ═(f©┤)ļsŻ¼¤o(w©▓)šō──éĆ(g©©)├±ūÕŻ¼Ųõį~ģR┴┐Č╝ĘŪ│Ż┤¾Ż¼╝┤╩╣╩Ū═¼ę╗éĆ(g©©) ╚╦Ż¼╦¹Ą─░l(f©Ī)ę¶ę▓ļSų°Łh(hu©ón)Š│╝░╔Ē¾wŪķørĄ─ūā╗»Č°ūā╗»ĪŻ─┐Ū░į┌┤¾į~ģRšZ(y©│)ę¶ūR(sh©¬)äeĘĮ├µ╠Ä ė┌LŽ╚Ąž╬╗Ą─IBM šZ(y©│)ę¶čąŠ┐ąĪĮMŻ¼Š═╩Ūį┌70─Ļ┤·ķ_(k©Īi)╩╝┴╦┤¾į~ģRšZ(y©│)ę¶ūR(sh©¬)äe蹊┐╣żū„ Ą─ ĪŻAT&A Ą─žÉĀ¢čąŠ┐╦∙ę▓ķ_(k©Īi)╩╝┴╦ę╗ŽĄ┴ąėąĻP(gu©Īn)ĘŪ╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeĄ─īŹ(sh©¬)“×(y©żn)ĪŻ▀@ę╗蹊┐ ÜvĮø(j©®ng)10─ĻŻ¼Ųõ│╔╣¹╩Ū┤_┴ó┴╦╚ń║╬ųŲū„ė├ė┌ĘŪ╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeĄ─ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕĄ─ĘĮĘ©ĪŻ
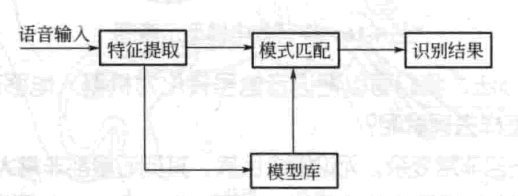
ĻP(gu©Īn)ė┌šZ(y©│)ę¶ūR(sh©¬)äeŻ¼▒Ē4-1ĮķĮB┴╦╚²ĘNų„ę¬─Ż╩ĮĪŻ
īóšZ(y©│)궹┼╠¢(h©żo)Ą─ŅlūVčžų°Ģr(sh©¬)ķg▌S╝ėęįš╣ķ_(k©Īi)Ż¼ųŲ│╔ŅlūVłDĪŻ┤╦Ę©╩Ū╚ĪšZ(y©│)궹┼╠¢(h©żo)Ą─Ņl┬╩ ╠žąįū„×ķ▒╚▌^╗∙ĄA(ch©│)ĪŻ┤╦ĘNĘĮĘ©ūR(sh©¬)äeŠ½Č╚ę╗░ŃŻ¼▀mė├ė┌ī”(du©¼)╔┘┴┐šZ(y©│)궥─ūR(sh©¬)äeŻ¼╝░ī”(du©¼)╠žČ© ╚╦šf(shu©Ł)įÆĄ─ł÷(ch©Żng)║Ž
╝┤ŠĆąįŅA(y©┤)╣└ŠÄ┤aĘ©Ż¼┤╦Ę©╩Ūī”(du©¼)šZ(y©│)궹┼╠¢(h©żo)│ķ╚ĪLPCŽĄöĄ(sh©┤)Ż¼╚╗║¾┼cģó┐╝śė░ÕĄ─LPCŽĄ öĄ(sh©┤)╝ėęį▒╚▌^Ż¼ėŗ(j©¼)╦Ń│÷ŲõķgĄ─Ī░▓ŅŠÓĪ▒ĪŻLPCĘ©╩Ū─ŻöM╚╦Ą─░l(f©Ī)ę¶Ų„╣┘śŗ(g©░u)įņČ°įO(sh©©)ėŗ(j©¼)Ą─ĪŻę“ ┤╦Ż¼LPCŽĄöĄ(sh©┤)Š═┤·▒Ē░l(f©Ī)ę¶Ų„╣┘Ū╗š{(di©żo)Ą─▓╗═¼ĀŅæB(t©żi)ĪŻ┤╦Ę©ę▓ė├ė┌╠žČ©╚╦Ą─šZ(y©│)ę¶ūR(sh©¬)äe
┤╦Ę©┐╔ė├ė┌ĘŪ╠žČ©╚╦Ą─šZ(y©│)ę¶ūR(sh©¬)äeĪŻ╝┤ę¬ūR(sh©¬)äe▓╗═¼╚╦Ą─░l(f©Ī)궯¼▓óŪęī”(du©¼)═¼ę╗éĆ(g©©)╚╦░l(f©Ī)═¼ę╗ éĆ(g©©)궯¼├┐┤╬░l(f©Ī)ę¶ę▓╬┤▒žę╗ų┬ĪŻ▀@ąĶę¬ėą┤¾┴┐Ą─Ī░ā”(ch©│)┤µĪ▒┼cĪ░▒╚▌^Ī▒ĪŻ┤╦Ę©╩Ū▓╔ė├Ī░Įy(t©»ng) ╗IĪ▒Ą─└ĒšōŻ¼Į©┴óšZ(y©│)궥─ĀŅæB(t©żi)▐D(zhu©Żn)ęŲ─Ż╩ĮĪŻĮø(j©®ng)┤¾┴┐Ą─šZ(y©│)ę¶┘Y┴ŽĄ├│÷─Ż╩ĮĄ─Ī░Ė┼┬╩Ī▒,▀x │÷Ī░ŽÓ╦Ų┬╩Ī▒ZĖ▀š▀
šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)Ą──Żą══©│Żė╔┬ĢīW(xu©”)─Żą═║═šZ(y©│)čį─Żą═ā╔▓┐ĘųĮM│╔Ż¼Ęųäeī”(du©¼)æ¬(y©®ng)ė┌ šZ(y©│)궥Įę¶╣Ø(ji©”)Ė┼┬╩Ą─ėŗ(j©¼)╦Ń║═ę¶╣Ø(ji©”)ĄĮūųĖ┼┬╩Ą─ėŗ(j©¼)╦ŃĪŻį┌┬ĢīW(xu©”)─Żą═ĘĮ├µŻ¼╬ęéāĮķĮBę╗Ž┬ HMM ┬ĢīW(xu©”)─Żą═ĪŻ
HMM ┬ĢīW(xu©”)Į©─ŻŻ║±RĀ¢┐╔Ę“─Żą═Ą─Ė┼─Ņ╩Ūę╗éĆ(g©©)ļx╔óĢr(sh©¬)ė“ėąŽ▐ĀŅæB(t©żi)ūįäė(d©░ng)ÖC(j©®)Ż¼ļ[ ±RĀ¢┐╔Ę“─Żą═HMM ╩ŪųĖ▀@ę╗±RĀ¢┐╔Ę“─Żą═Ą─ā╚(n©©i)▓┐ĀŅæB(t©żi)═ŌĮń▓╗┐╔ęŖ(ji©żn)Ż¼═ŌĮńų╗─▄┐┤ ĄĮĖ„éĆ(g©©)Ģr(sh©¬)┐╠Ą─▌ö│÷ųĄĪŻī”(du©¼)šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)Ż¼▌ö│÷ųĄ═©│ŻŠ═╩ŪÅ─Ė„éĆ(g©©)ļėŗ(j©¼)╦ŃČ°Ą├Ą─┬Ģ īW(xu©”)╠žš„ĪŻė├HMM ┐╠«ŗšZ(y©│)궹┼╠¢(h©żo)ąĶū„│÷ā╔éĆ(g©©)╝┘įO(sh©©)Ż¼ę╗╩Ūā╚(n©©i)▓┐ĀŅæB(t©żi)Ą─▐D(zhu©Żn)ęŲų╗┼c╔Žę╗ ĀŅæB(t©żi)ėąĻP(gu©Īn)Ż¼┴Ēę╗╩Ū▌ö│÷ųĄų╗┼c«ö(d©Īng)Ū░ĀŅæB(t©żi)(╗“«ö(d©Īng)Ū░Ą─ĀŅæB(t©żi)▐D(zhu©Żn)ęŲ)ėąĻP(gu©Īn)Ż¼▀@ā╔éĆ(g©©)╝┘įO(sh©©) ┤¾┤¾ĮĄĄ═┴╦─Żą═Ą─Å═(f©┤)ļsČ╚ĪŻHMM Ą─┤“ĘųĪóĮŌ┤a║═ė¢(x©┤n)ŠÜŽÓæ¬(y©®ng)Ą─╦ŃĘ©╩ŪŪ░Ž“╦ŃĘ©Īó Viterbi╦ŃĘ©║═Ū░Ž“║¾Ž“╦ŃĘ©ĪŻ
┐éĄ─üĒ(l©ói)šf(shu©Ł)Ż¼šZ(y©│)ę¶ūR(sh©¬)äe╝╝ąg(sh©┤)Š═╩ŪūīÖC(j©®)Ų„═©▀^(gu©░)ūR(sh©¬)äe║═└ĒĮŌ▀^(gu©░)│╠░čšZ(y©│)궹┼╠¢(h©żo)▐D(zhu©Żn)ūā ×ķŽÓæ¬(y©®ng)Ą─╬─▒Š╗“├³┴ŅĄ─Ė▀╝╝ąg(sh©┤)Ż¼Ųõ╝╝ąg(sh©┤)┴„│╠łD╚ńłD4-17╦∙╩ŠĪŻšZ(y©│)ę¶ūR(sh©¬)äe╝╝ąg(sh©┤)ų„ ę¬░³└©╠žš„╠ß╚Ī╝╝ąg(sh©┤)Īó─Ż╩ĮŲź┼õ£╩(zh©│n)ät╝░─Żą═ė¢(x©┤n)ŠÜ╝╝ąg(sh©┤)╚²éĆ(g©©)ĘĮ├µĪŻšZ(y©│)ę¶ūR(sh©¬)äe╝╝ąg(sh©┤)▄ć ┬ō(li©ón)ŠW(w©Żng)ę▓Ą├ĄĮ┴╦│õĘųĄ─ę²ė├Ż¼└²╚ńį┌ęĒ┐©▄ć┬ō(li©ón)ŠW(w©Żng)ųąŻ¼ų╗ąĶ░┤ššę╗µI═©┐═Ę■╚╦åT┐┌╩÷ ę¬Ū¾╝┤┐╔įO(sh©©)ų├─┐Ą─Ąžų▒Įėī¦(d©Żo)║ĮŻ¼░▓╚½Īó▒ŃĮ▌ĪŻšZ(y©│)ę¶ūR(sh©¬)äe╝╝ąg(sh©┤)š²│»ų°─▄ūR(sh©¬)äe╚╬ęŌ╚╦ ░l(f©Ī)궥─ĘĮŽ“░l(f©Ī)š╣ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |


